简介
该3自由度混连机械臂由一个平面两自由度并联机械臂和一个1自由度串联机械臂组成。
其中,平面两自由度并联机械臂长度为:
L1=0.4m,L2=0.3m,L3=0.5m,L4=0.5m L5=0.3m
1自由度串联机械臂长度为:
L6=0.38m
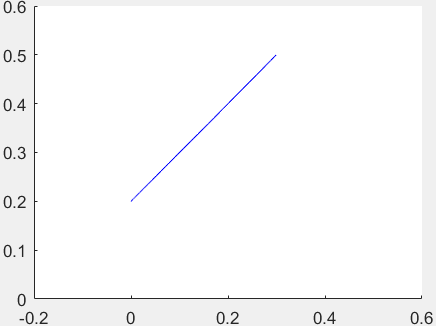
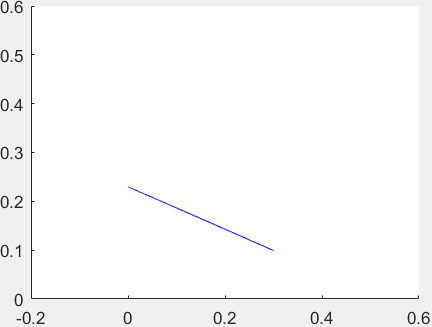
L1、L2、L3、L4、L5构成五杆机构,每两个杆之间均用转动副相连,其中L2、L5为主动件,驱动该机械臂的运动;连接L3、L4的转动副同时与L6相连,构成移动副,使杆L6可以在竖直平面内移动。L6的末端为机械臂的卡爪,可以抓取物品。也就是L1、L2、L3、L4、L5组成的五杆机构控制机械臂在水平面的运动,杆L6控制机械臂在竖直面的运动。通过SimMechanics模型的建立可以控制末端机械臂的运动状态,使之在5s内从初始位置(0,0.2m,0)沿直线运动到目标位置(0.3m,0.5m,0.1m),并能够在5s后停留在此位置。
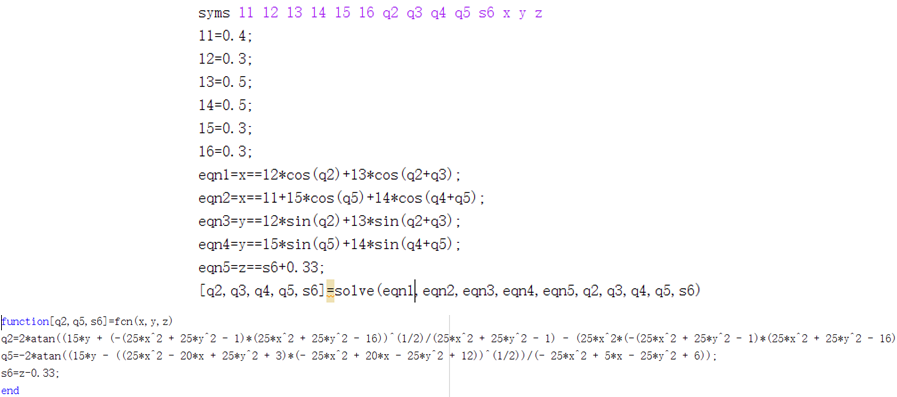
matlab反解片段
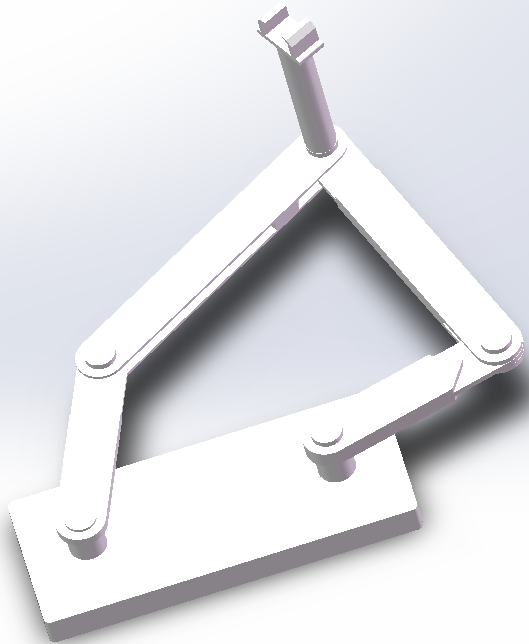
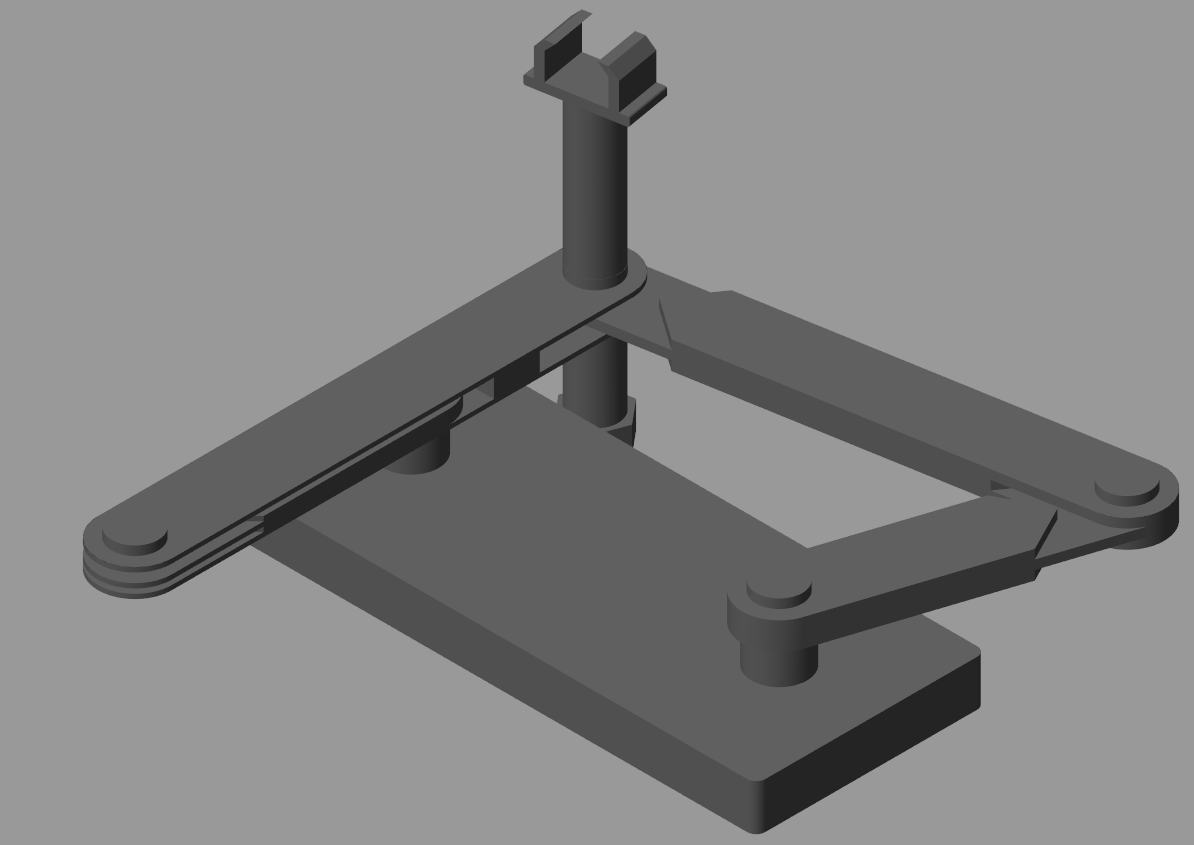
solidworks模型图
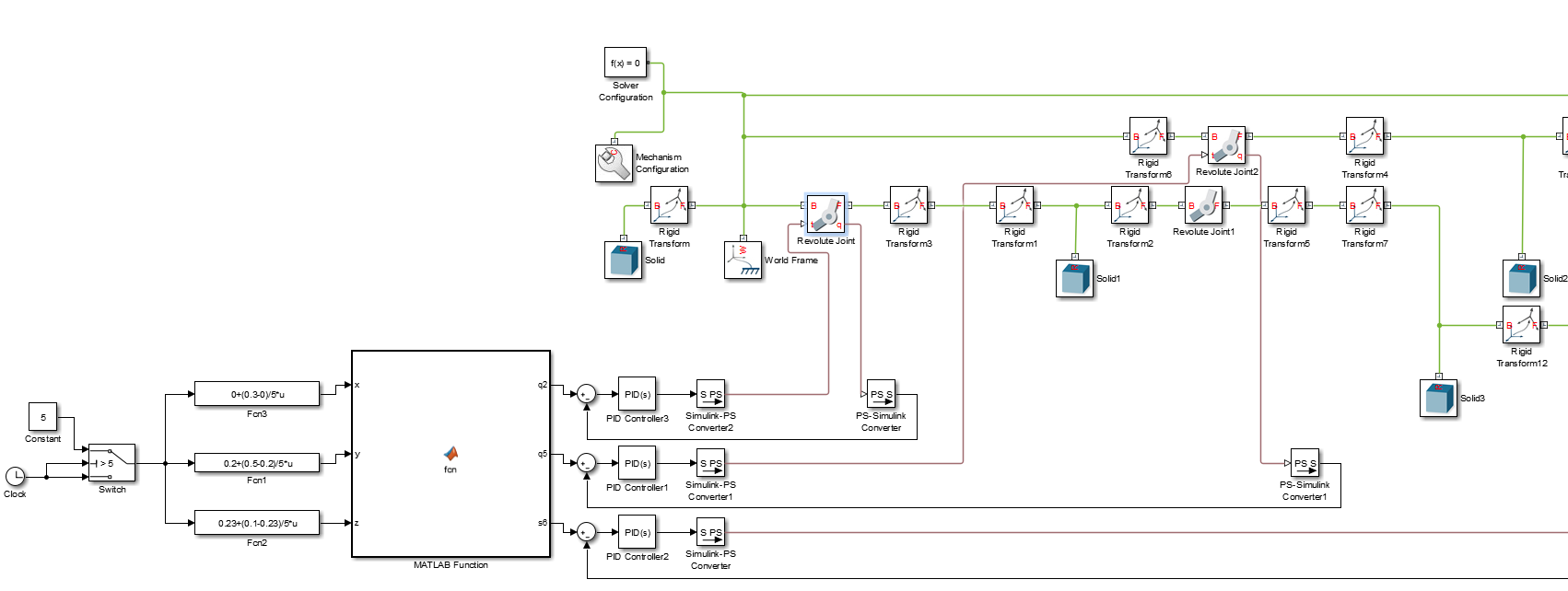
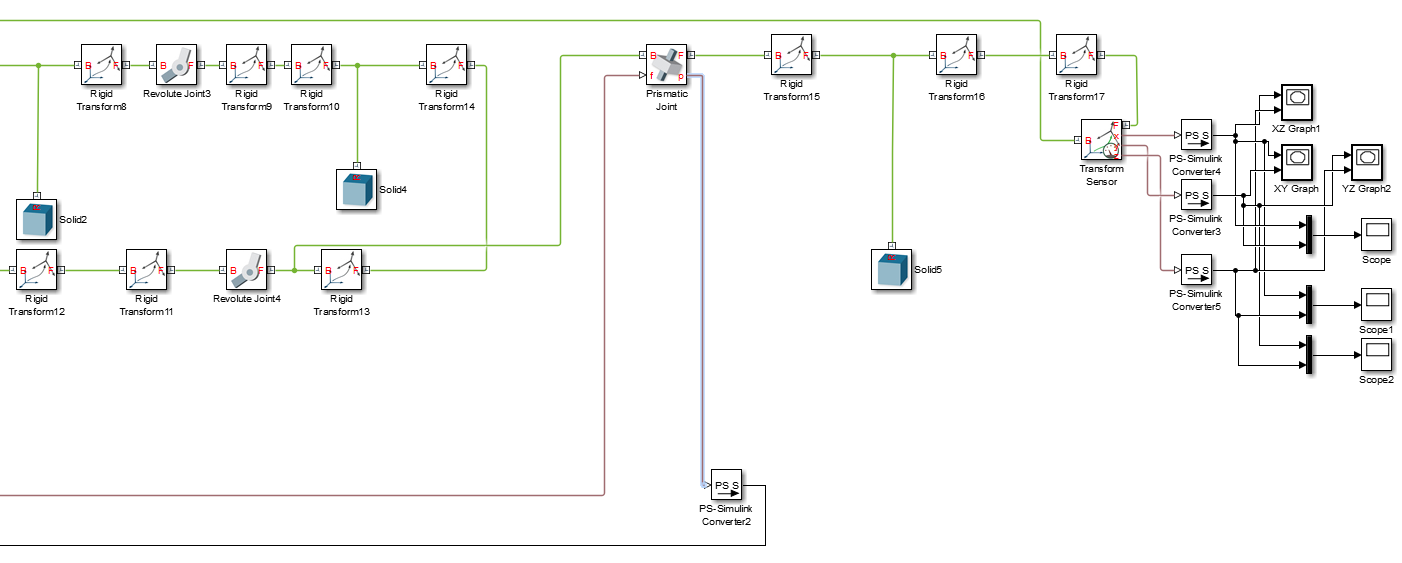
SimMechanics模型
仿真
初始状态
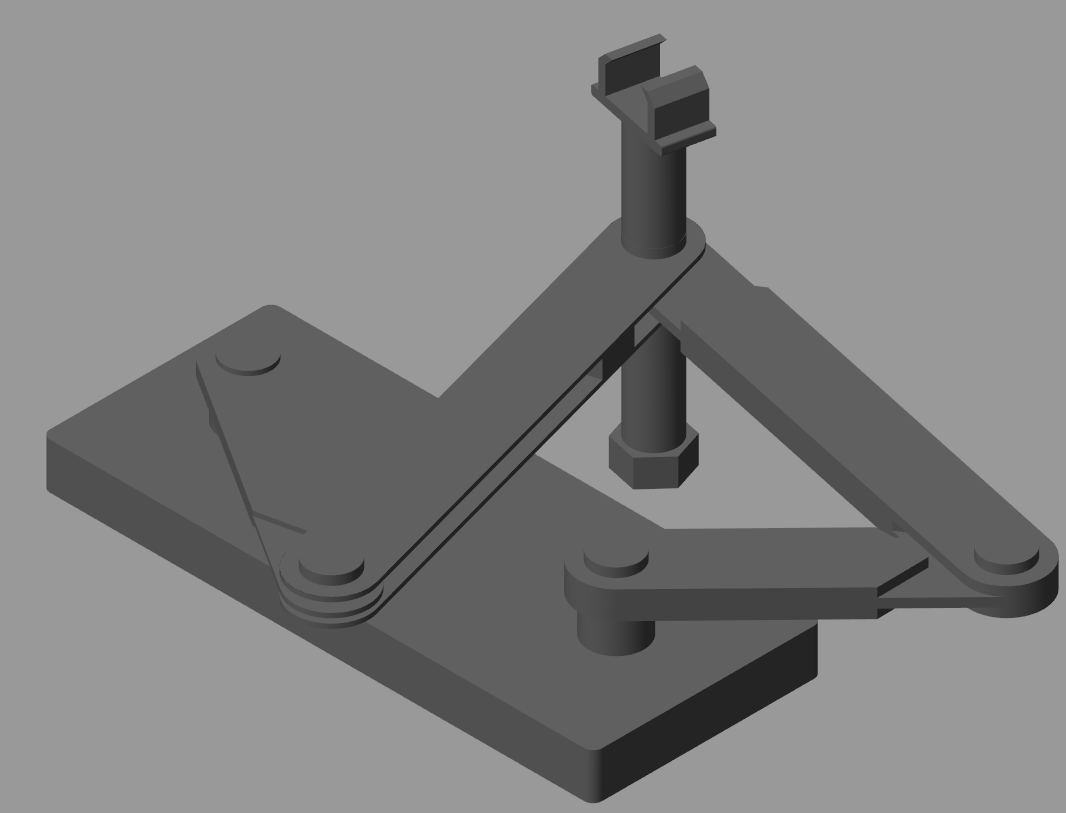
运行2s后状态
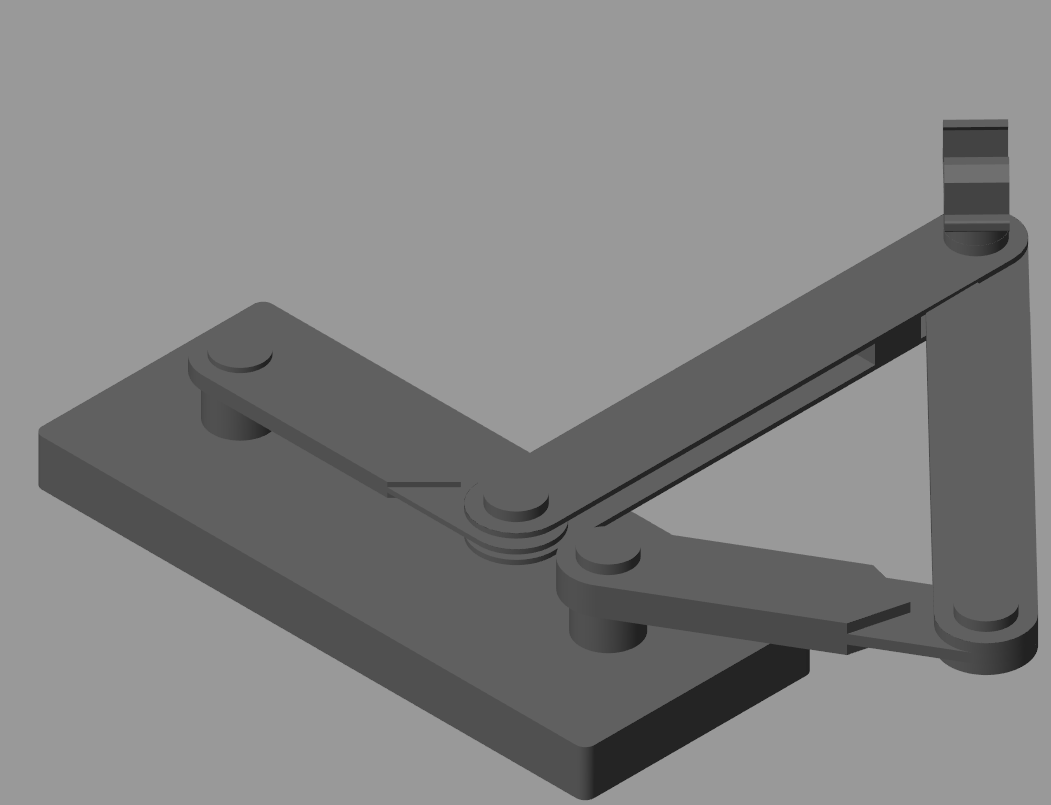
运行5s后状态
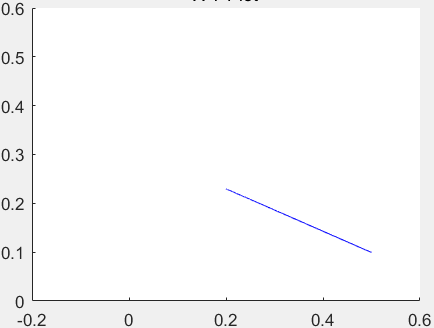
运动轨迹
XY
XZ
YZ